EM versus optische positietracking voor neuronavigatie
Tijdens neuronavigatie is het van groot belang dat de 3D-positie en hoek van de TMS-spoel, de digitaliserings pen en het hoofd van de patiënt te allen tijde bekend zijn. Het bijhouden van deze posities kan worden uitgevoerd met optische tracking waarbij gebruik gemaakt wordt van grote camera's op een statief of elektromagnetische (EM) tracking op basis van een DC-gepulseerd magnetisch veld dat wordt uitgezonden door een kleine box.
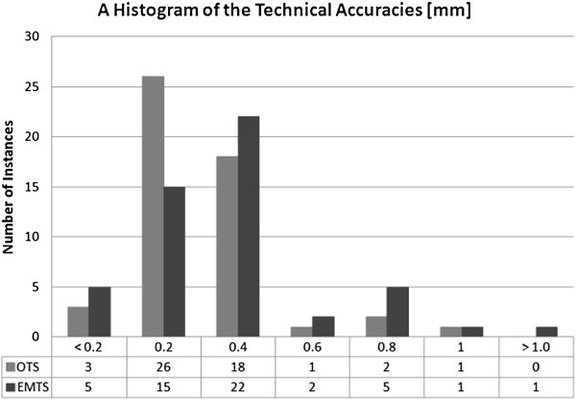
DC-EM-tracking zoals gebruikt door ons systeem wordt niet verstoord door de aanwezigheid van metalen in de buurt, zoals koper, aluminium en roestvrij staal, in tegenstelling tot AC EM-tracking. Zowel optische als EM-tracking technieken hebben hun waarde bewezen en zijn even nauwkeurig gebleken in grotere onderzoeken (Koivukangas, 2013 en Ricci, 2008).
Voor de nauwkeurigheid van stereotactische positiemetingen op het hoofd moet er rekening mee worden gehouden dat de totale afwijking van neuronavigatie wordt gedomineerd door ruimtelijke fouten in de MRI-segmentatie van de huid en de hersenen in het hoofdmodel op het scherm, de plaatsing van markeringen op het hoofdmodel en de meting aan het hoofd met een digitaliseringspen. De nauwkeurigheid van de feitelijke positiemeting van de sensoren, die ongeveer een millimeter is voor zowel optische als EM-processen, speelt een eerder ondergeschikte rol hierin (zie Neggers et al, 2004).
Eén van de belangrijkste nadelen van optische tracking is de zogenaamde ‘line-of-sight occlusion’, of het onvermogen om te volgen en te navigeren wanneer het zicht van de camera wordt geblokkeerd, bijv. door de arm van een persoon die de apparatuur bedient. Dit blijkt in de praktijk echt hinderlijk te zijn bij optische navigatie. Andere nadelen zijn de grote camera standaard en de kleinere sensoren.
De EM-tracking daarentegen heeft geen ongemakken zoals ‘line of sight occlusion’ de apparatuur neemt slechts een klein deel van de ruimte in beslag. Natuurlijk interfereert een magnetische puls die wordt gegenereerd door een TMS-spoel heel kort (ongeveer 1 milliseconde) met het tracken van de EM-positie nabij de TMS-spoel. Deze korte interferentie van de TMS puls op het de EM tracking (~1 milliseconde) wordt gedetecteerd door de gepatenteerde en geteste algoritmes van de Neural Navigator, en zodoende uitgefilterd kunnen worden. Hierdoor kan de positie van de TMS spoel en het hoofd naadloos plaatsvinden, zelfs tijdens high-frequency rTMS en theta burst TMS protocollen.
Zodoende kunt u erop vertrouwen dat onze betrouwbare en gevalideerde op EM gebaseerd tracking neuronavigatie techniek voor TMS aan al uw behoeften voldoet. Het blokkeren van de 'line-of-sight’ is niet mogelijk en u bespaart ook nog aanzienlijk ruimte in uw behandelkamer.